
2023-12-24 | Choloepus
Choloepus, a flexible gripper with FOC control
XiangChang
Choloepus is a flexible gripper driven by a three-phase motor with Field-Oriented Control (FOC).
Choloepus
Introduction
Choloepus is a flexible gripper driven by a three-phase motor with Field-Oriented Control (FOC).

Performance & Features
- Capable of lifting 3kg of water
- Capable of delicate operations such as picking up a needle or gripping an eggshell (video demo)
- Maximum drive current: 2A
- Drive voltage range: 12V ~ 24V
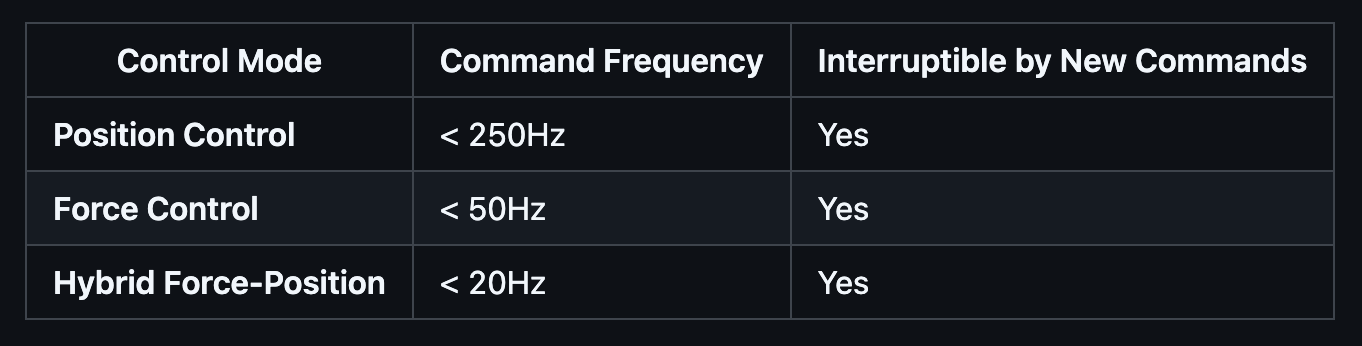
- Supports three control modes:
- Force closed-loop (current loop)
- Position closed-loop
- Hybrid force-position control
- Weight: 300g
Mechanical Structure
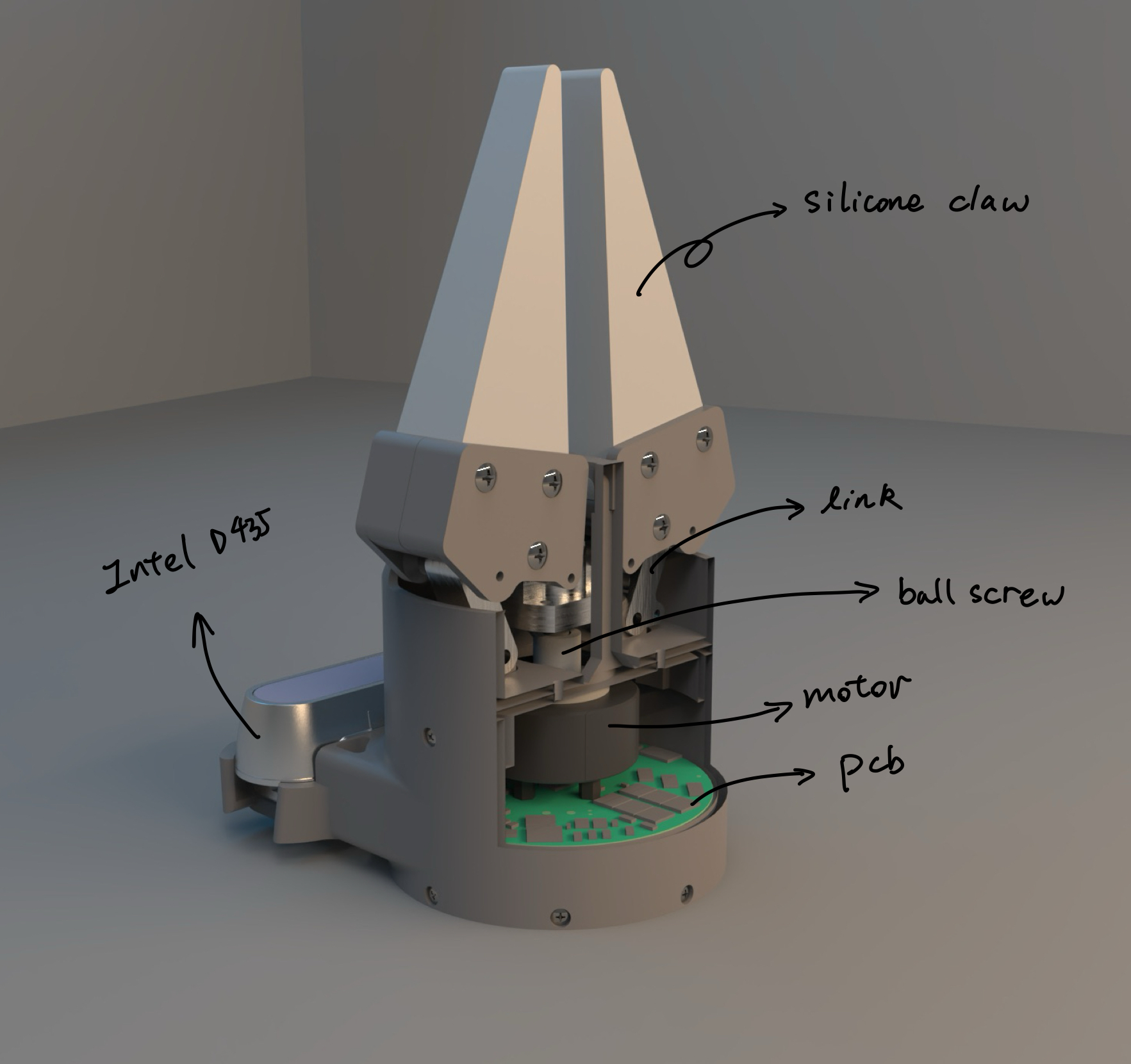
Except for the motor and the depth camera, all other components were designed in-house. They can be fabricated via 3D printing and basic mechanical processing. You can find the models and engineering drawings in the /0.Model directory.
Circuit Design
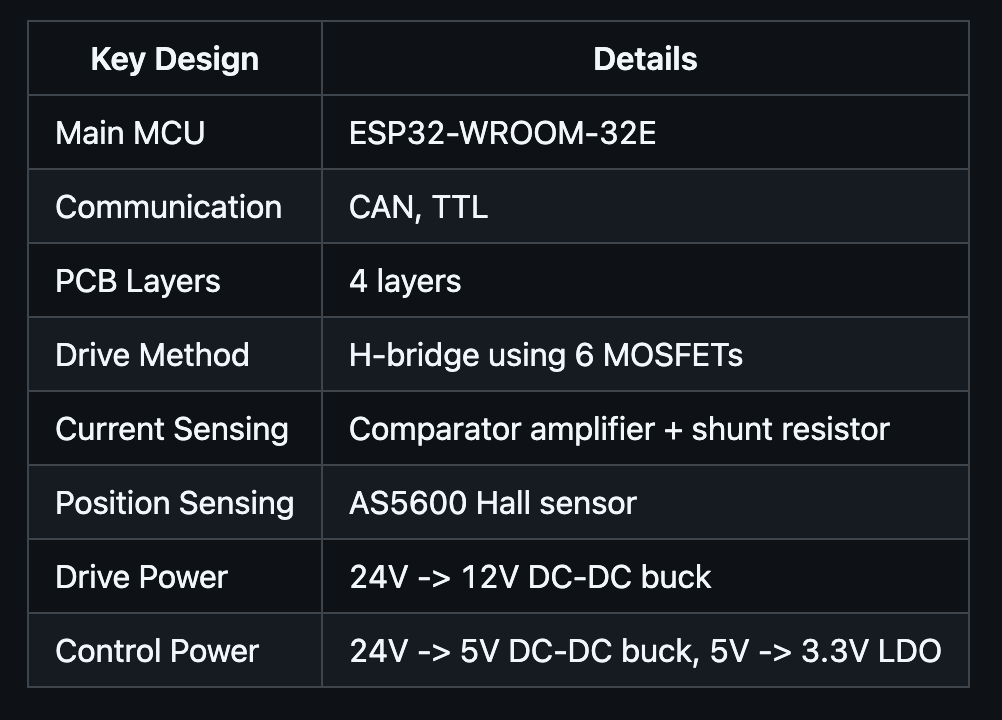
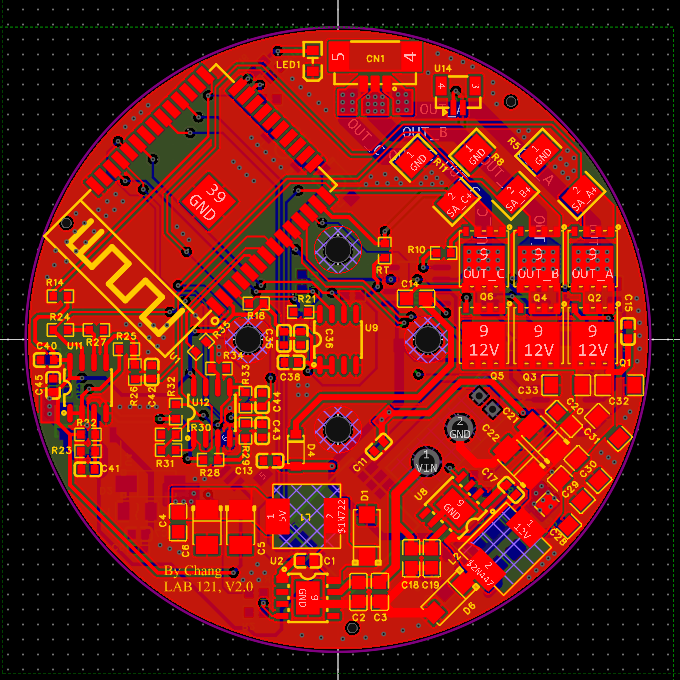
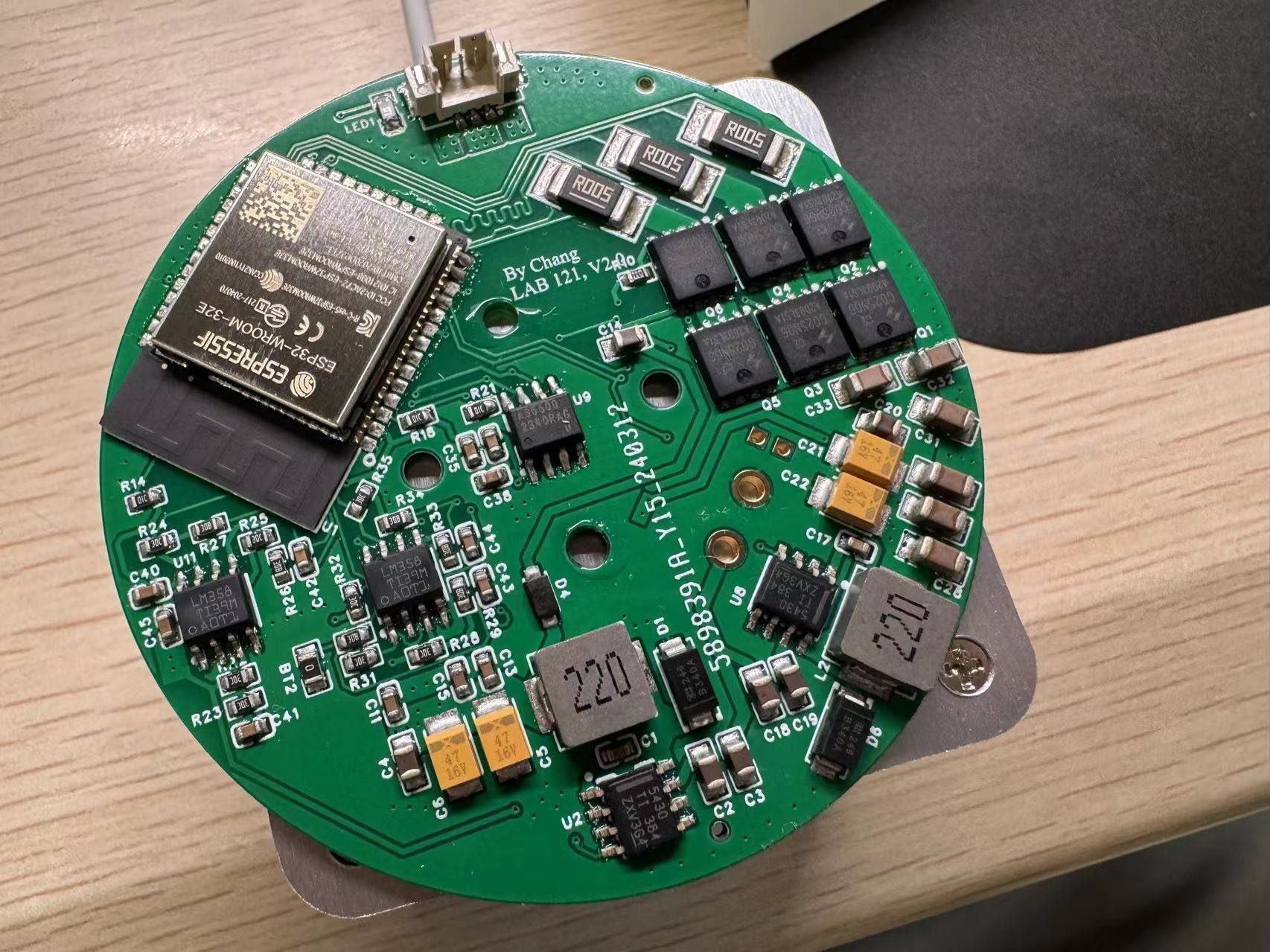
You can find the circuit schematics and PCB layout in ./Hardware.
Firmware
This project’s firmware is developed with PlatformIO under the Arduino framework.
We have built upon the open-source project SimpleFOC and made optimizations to drive the flexible gripper with FOC control.
The firmware is located in ./2.Frimware.
Communication
At the bottom of Choloepus, there is a 4-PIN XT30 connector that supports a DC input voltage of 12 ~ 24V and CAN bus communication.
In the /3.Software directory, you will find a Python library that lets you create a Choloepus object and establish communication:
my_gripper = gripper(serial_port='COM10', id_num=20)
Choloepus supports different control modes, shown below:
Video Demo
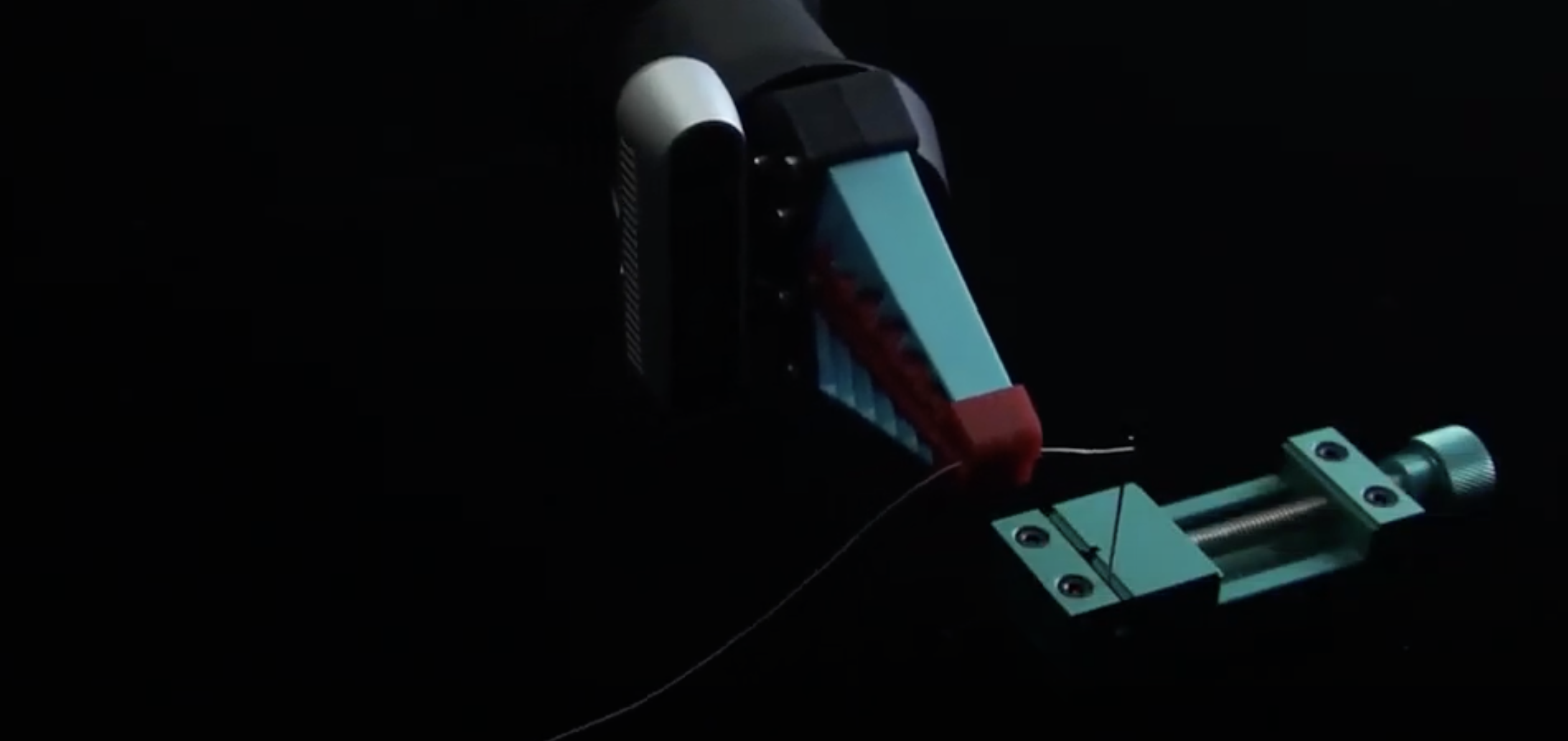
This video demonstrates how Choloepus collaborates with a continuum robotic arm designed in our lab to perform a grape suturing operation.
License
Choloepus is released under the AGPL-3.0. For more details, please refer to the LICENSE.
Contact
Feel free to reach out to me at: changxiangchina@outlook.com